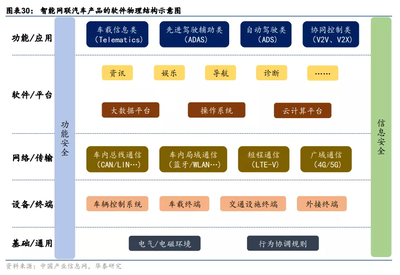
汽车中控及ADAS辅助驾驶芯片设计指南 软件与辅助设备研发全景解析
随着汽车智能化浪潮席卷全球,汽车电子架构正经历深刻变革。中央控制系统(中控)与高级驾驶辅助系统(ADAS)作为智能座舱与智能驾驶的核心,其底层芯片的设计与配套软件、辅助设备的研发,已成为决定整车性能、安全与用户体验的关键。本文将系统性地探讨汽车中控及ADAS芯片的设计要点,并深入剖析其软件生态与关键辅助设备的研发路径。
一、 芯片设计:性能、安全与能效的平衡艺术
汽车芯片设计已超越传统消费电子范畴,需满足车规级可靠性、功能安全、信息安全及长期供货的严苛要求。
- 架构选择与异构计算:
- 中控芯片:趋向于集成度更高的SoC(片上系统),通常采用“CPU + GPU + NPU”的异构架构。CPU处理通用任务与操作系统,GPU负责高分辨率多屏显示与UI渲染,NPU则专攻AI语音助手、人脸识别等智能交互功能。算力需求正向百TOPS级迈进,以支撑3D沉浸式座舱体验。
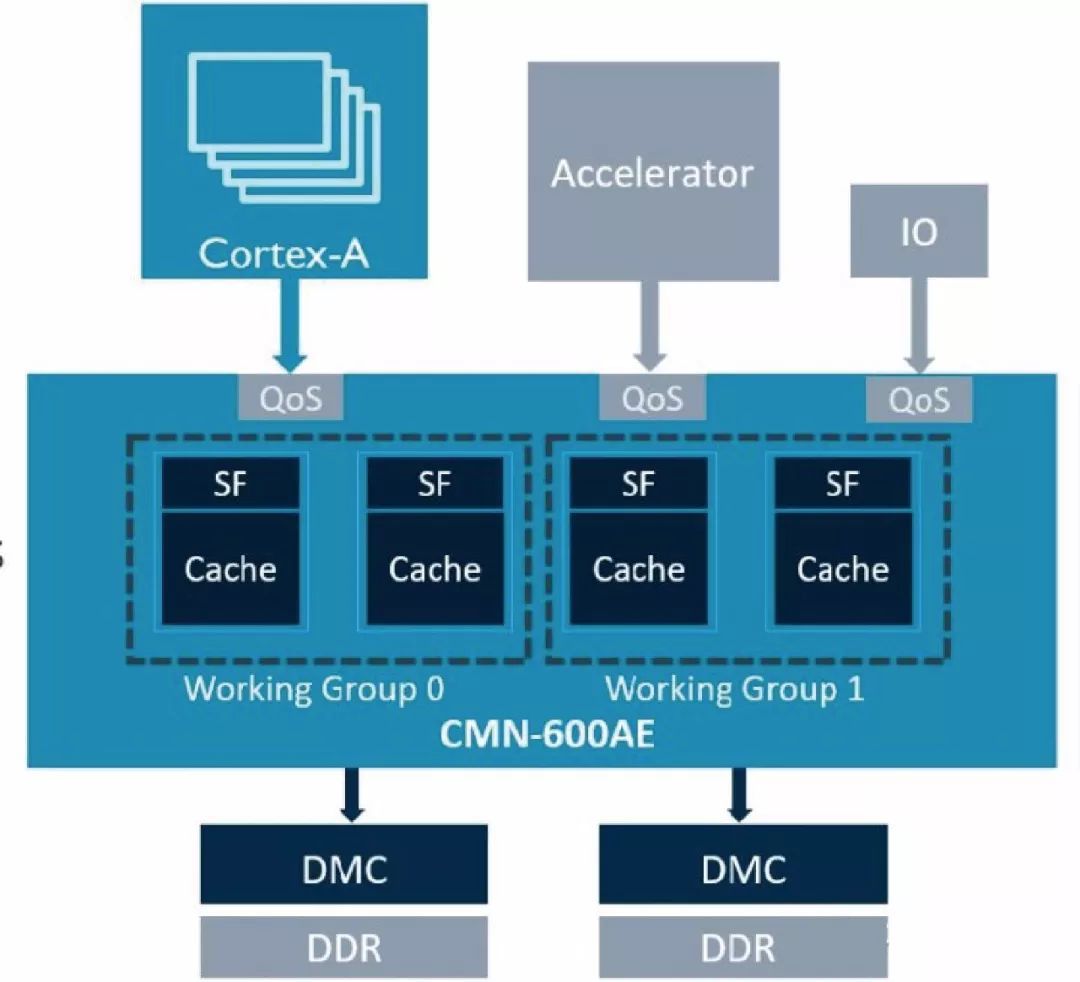
- ADAS芯片:是自动驾驶的“大脑”,其设计核心是高算力、低延迟与高能效比。主流采用“CPU + GPU + 专用AI加速器(如DLA、TPU)”或域控制器芯片方案。它必须能并行处理来自摄像头、雷达、激光雷达的多模态传感器数据,实现感知、融合、规划与控制的全链路计算。目前,领先的ADAS芯片算力已进入数百至上千TOPS时代。
- 车规级与功能安全:
- 必须符合 AEC-Q100 等可靠性标准,并遵循 ISO 26262 功能安全流程,芯片本身需达到 ASIL-B 至 ASIL-D 的安全等级。这要求在设计阶段就融入安全机制,如锁步核(Lockstep Core)、内存保护单元(MPU)、错误校正码(ECC)等。
- 信息安全同样不可或缺,需集成硬件安全模块(HSM),支持安全启动、加密解密、身份认证,以防范网络攻击。
- 工艺与能效:
- 先进制程(如7nm、5nm)在提升算力、降低功耗方面优势明显,但需综合考虑车规认证成本与长期稳定性。
- 精细化的功耗管理(DVFS、电源门控)对保障系统稳定运行、延长续航至关重要。
二、 软件栈:定义智能的灵魂
芯片的硬件能力需通过强大的软件栈才能释放,软件定义汽车已成为行业共识。
- 操作系统与中间件:
- 中控系统:底层多采用QNX(高安全、高实时)或Linux/AOSP(生态丰富、灵活)作为基础。其上运行着复杂的车载信息娱乐(IVI)应用、仪表盘及各类服务。Hypervisor虚拟化技术允许不同安全等级的操作系统(如QNX与Android)在同一硬件上隔离运行。
- ADAS/自动驾驶系统:普遍采用基于ROS 2 或 AUTOSAR Adaptive 平台的框架。AUTOSAR Classic(CP)用于传统ECU,而Adaptive(AP)则更适用于高性能计算平台,支持面向服务的架构(SOA),实现软硬件解耦与OTA升级。
- 算法与开发工具:
- 中控:集成计算机视觉(CV)算法用于驾驶员监测(DMS),自然语言处理(NLP)算法用于语音交互,以及丰富的图形渲染引擎。
- ADAS:这是软件的核心战场,涵盖感知(目标检测、语义分割、多传感器融合)、定位与建图(SLAM)、路径规划与控制等全套算法。芯片厂商需提供完善的SDK、神经网络编译器、量化工具、仿真环境,以降低算法部署难度,优化性能。
- 功能安全与预期功能安全(SOTIF):
- 软件需遵循ISO 26262进行开发,并通过ASIL等级认证。针对ADAS在复杂场景下的性能局限,需遵循 ISO 21448 SOTIF 标准,通过仿真测试、真实路测等手段,尽可能减少未知不安全场景的风险。
三、 关键辅助设备研发:协同进化的生态系统
芯片与软件的效能,依赖于一系列辅助设备的精准配合。
- 传感器模块:
- 摄像头模组:高动态范围(HDR)、LED闪烁抑制(LFM)技术是研发重点,需与芯片的ISP(图像信号处理器)深度协同优化。
- 雷达(毫米波/激光雷达)处理单元:研发高性能的射频前端、信号处理算法与点云处理加速单元,以实现更远的探测距离、更高的分辨率与更低的误报率。
- 高精度定位与连接设备:
- 集成GNSS/IMU的高精度定位模块是自动驾驶的“时空坐标”。
- V2X通信模块(如C-V2X)的研发,使车辆能与其他车辆、基础设施通信,扩展感知范围,是实现高阶自动驾驶的关键辅助。
- 测试验证设备与平台:
- 硬件在环(HIL)与车辆在环(VIL)测试系统:用于在实验室环境中模拟复杂、极端的驾驶场景,对芯片、软件和算法进行大规模、可重复的验证,大幅降低实车测试成本与风险。
- 数据采集与标注平台:自动驾驶算法的训练依赖于海量高质量的标注数据。研发高效、自动化的数据采集车、云端标注工具与管理系统,是提升研发效率的基础设施。
###
汽车中控及ADAS芯片的设计,是一个集尖端半导体工艺、系统架构、功能安全与人工智能于一体的综合性工程。其成功不仅取决于芯片本身的算力,更依赖于与之深度耦合的、分层解耦的软件栈,以及一个由传感器、定位、通信、测试设备构成的强大辅助研发生态系统。随着电子电气架构向中央计算+区域控制演进,芯片的“舱驾融合”趋势愈发明显,对跨域协同设计、软件平台统一及全栈研发能力提出了更高要求。只有在这三方面持续深耕、协同创新,才能在这场智能汽车的竞赛中赢得先机。
如若转载,请注明出处:http://www.owlmybaby.com/product/62.html
更新时间:2026-06-19 23:52:34